RasterNet: Modeling Free-Flow Speed using LiDAR and Overhead Imagery
Armin Hadzic, Hunter Blanton, Weilian Song, Mei Chen, Scott Workman, and Nathan Jacobs. EARTHVISION 2020
We propose RasterNet, a multi-modal neural network architecture that combines overhead imagery and airborne LiDAR point clouds for the task of free-flow speed estimation.
Estimation Displaced Populations from Overhead
Armin Hadzic, Gordon Christie, Jeffrey Freeman, Amber Dismer, Stevan Bullard, Ashley Greiner, Nathan Jacobs, and Ryan Mukherjee. IGARSS 2020
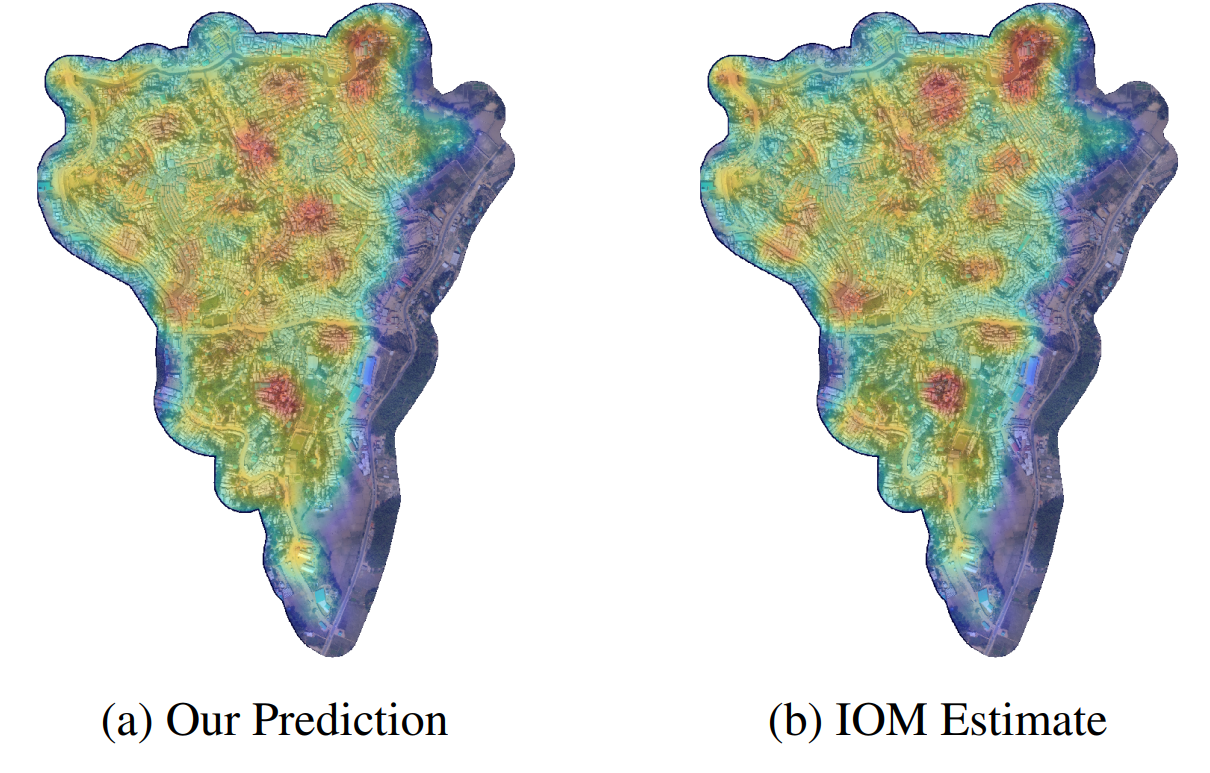
We developed a method for estimating displaced community populations from high resolution overhead imagery.
FARSA: Fully Automated Roadway Safety Assessment
Weilian Song, Scott Workman, Armin Hadzic, Xu Zhang, Eric Green, Mei Chen, Reginald Souleyrette, and Nathan Jacobs. WACV 2018
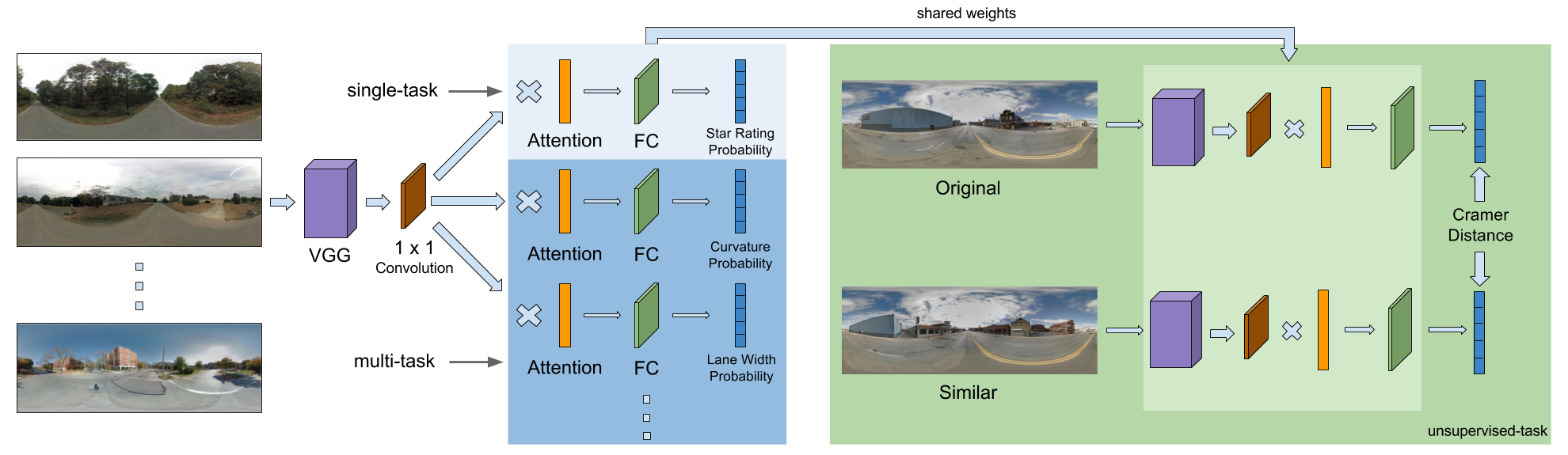
We propose an automated process to access roadway safety using a deep convolutional neural network. Given a road segment and its street-level panorama, we can estimates a safety rating alongside many other road-level attributes, including curvature, roadside hazards, etc.